【seeds IoT】確かさ(時間遅れ・飽和)を考慮したロバスト制御
- 2022/5/23
- 大学のシーズ
豊田工業大学 制御システム研究室 准教授 川西通裕
■研究概要
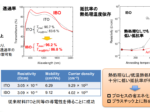
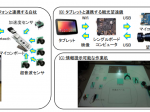
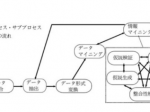
IoT通信ネットワークを活用して電力ネットワーク、無線センサネットワーク、交通網の制御を行う際、局所的なエージェント間の協調行動によって、大域的な目標を達成できるか否かを検証するコンセンサス制御問題が重要となります。本研究では、IoT通信ネットワークにおいて時間遅れや飽和などの不確かさが存在する制約付きコンセンサス問題をグラフ構造のエッジダイナミクスを用いて冗長性のない低次元なマルチエージェントシステムへと変換し、従来は出来なかった大域的に指数オーダーの収束性を達成するロバストなコンセンサス制御を実現しています。
■応用分野
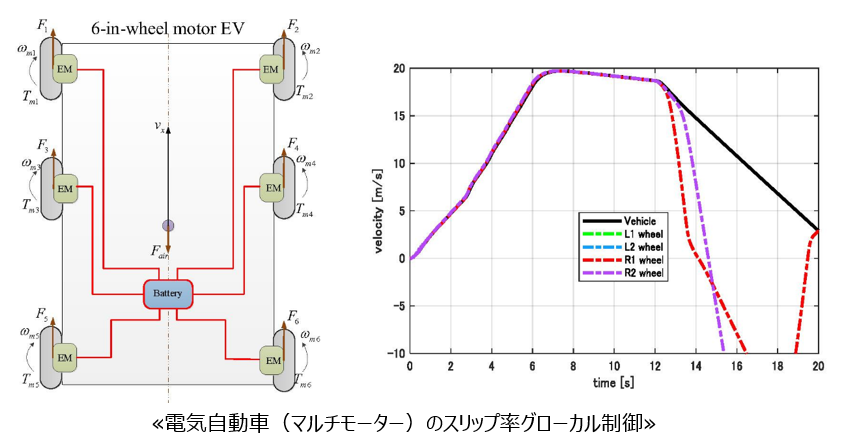
受動性を考慮して大域的な目的関数と局所的な仕様を同時に最適化する制御を実現するグローカル制御を開発してドローン(マルチローター)や電気自動車(マルチモーター)のシステムに応用し、複数のローターやモーターから構成されるシステムにおいて、障害に対応できるレジリエントな制御を実現することを目指しています。
■お問い合わせ
豊田工業大学 研究支援部研究協力グループ
電話:052-809-1723
FAX :052-809-1721
E-mail:research@toyota-ti.ac.jp
この著者の最新の記事




関連記事