【seeds VR】VR 用全方位歩行プラットフォーム
- 2021/7/26
- 大学のシーズ

広島市立大学 情報科学研究科 システム工学専攻 講師 脇田 航
■研究キーワード:VR、歩行装置、トレッドミル、ロコモーションインタフェース
■研究シーズの概要
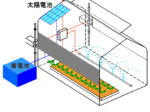
歩行者の進行方向に大腿部を支持しながら歩行動作を推定・視覚呈示することにより、足が滑ることなく、ユーザが安全かつ能動的に定位置で全方位に歩行可能な歩行プラットフォームを研究開発しています。
■研究シーズの詳細
大腿部支持部に載置された荷重センサによって歩行動作(足の動き、歩行速度)を推定し、HMD 等の視覚ディスプレイを介して歩行動作を呈示することにより、簡易な仕組みで全方位に定位置で歩行することが可能です。足が滑ることがなく、床面も稼働しないため、安心安全にユーザの歩く動作に応じて能動的に歩行することが可能です。映像や移動ロボット等と組み合わせることにより、自宅にいながら旅行気分を味わったり、第一人称視点でロボットを自身の動作に応じて制御すること等が可能です。別途研究開発を行っているモーションプラットフォームと組み合わせることにより、斜面や地面感覚の呈示も可能です。
■想定される用途・応用例
〇ゲーム・エンターテインメント、バーチャル観光・美術館・博物館・展示会等
〇リハビリテーション、技能訓練、避難訓練、交通安全、各種シミュレーション
〇ドローン等の移動ロボット制御等
■セールスポイント
従来装置のように足が滑ることなく、床面も動かないので安心安全です。簡易な仕組みでリアルな歩行感覚を呈示することができます。
国際特許出願中(PCT/JP2018/007279)
■問い合わせ先
広島市立大学 社会連携センター
〒731-3194 広島市安佐南区大塚東三丁目 4 番 1 号
TEL:082-830-1764 FAX:082-830-1555
E-mail:shakai@m.hiroshi

関連記事