【seedsロボット】アクティブ音源定位によるロボット位置同定 ~音のみでロボットが自位置認識~
- 2019/6/24
- 大学のシーズ
「アクティブ音源定位によるロボット位置同定 ~音のみでロボットが自位置認識~」
会津大学大学院コンピュータ理工学部ヒューマンインタフェース研究室 上級准教授 黄 捷
■概要
○音認識の必要性
これまでのロボットは、主に明るい所での作業がほとんどであり、暗闇等の状況では音を頼りに行動するしかなかった。しかし、このロボットは暗闇でも行動できる。
○認識までの流れ
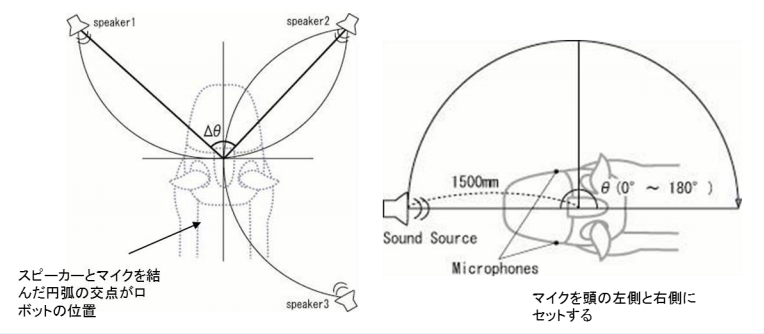
4つのスピーカー(音源)を部屋の4隅に配置し、中央にマイク2つを装着したロボットを配置する。音源が音を出したら、2つのスピーカーの方位角の差からマイクと結んだ円を計算する。
2回目の測定でロボットの頭の向きを変える(もう1つの円の形成)。これらの2つ の円の交点がロボットの位置であると認識させる。
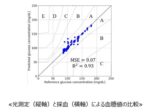
○3回の計測でより正確な位置認識
このシステムでは1つの音源に対して最低2 回の計測で方位角を認識できるが、3回計測することにより誤差を最小限に抑えることができる(角度:1.8度、距離7cm)。
■実用化の可能性
○ホームセキュリティ
音に反応するので、ホームセキュリティと しての利用が考えられる。経費も安価で抑えることができる。
○自主性
位置を正確に認識できるので、より自主性 を持つロボットとして、さまざまな分野での 利用が考えられる。
■メッセージ
○従来の位置認識ではGPS、画像認識、ネットワークセンサによる方式が使用されていますが、開発、実用化に向けたコストは高くなります。
しかし、音響による本方式はかなりコストが安く抑えられます。
○画像認識できない暗闇や、電波障害が生ずる場所で音響による位置認識は従来の方法を高度化する新しい領域です。
~暗闇でも活躍!音があればどこでも位置認識~
■関連特許
音像定位装置及び音像定位方法 (特願2006-075524、075525 【特許第4689506号、4949706号】 )
関連記事