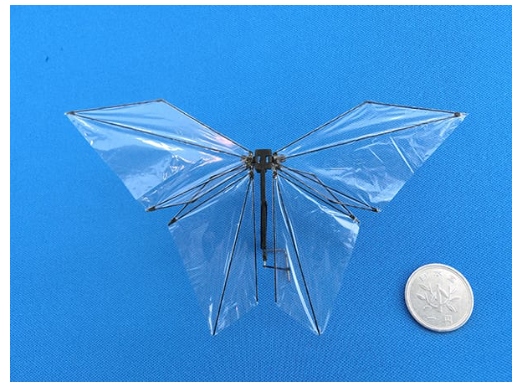
【seeds ドローン】蝶をモデルとした小型はばたきロボットの開発~ひらひらと宙を舞うロボット~
- 2023/2/27
- 大学のシーズ
東京電機大学 未来科学部 ロボット・メカトロニクス学科 准教授 藤川 太郎
■概要
近年、観測システムなどでの利用を目的とした小型飛行ロボットの開発が盛んですが、より小さな昆虫サイズのロボット研究も進められています。しかし、わずか数cm・数gサイズの機体に動力や姿勢制御のための複数のアクチュエータ、センサなどを搭載することは困難であり、未だ実用化には至っていません。昆虫の飛翔メカニズムをロボットに応用するため,蝶の中で「アゲハチョウ」をモデルとして飛翔の様子を解析した結果、翅の打ち下ろしで上昇しつつ体を起こし、打ち上げで前進する「階段状の飛翔」を行っていることが明らかになりました。このような動作を実現するために、はばたき機構を勘案し、蝶と同様の飛翔をロボットで実現しています。
展示会でも小型はばたきロボットは、参加者の児童にも科学的な刺激を与え、「将来同じようなロボットを開発したい」という夢を与える一幕もありました。
この機構は藤川先生が、千葉工業大学菊池研究室在籍時に特許を取得され、先生の研究は2015年4月号の科学雑誌「ニュートン」にも掲載されました。
■今後の展開
今後超小型のアクチュエータやバッテリー、カメラ、センサなどを搭載し、様々な場面で活用されることを期待しています。省自由度で姿勢制御を可能とする手のひらサイズの小型はばたきロボットを開発中です。
■活用例
・災害現場におけるがれきの隙間など狭隘空間での観測システム。
・広域に多数飛翔させ、情報収集を図る群ロボットシステム。
・イベント、アミューズメント用ロボット
■お問い合わせ
東京電機大学
研究推進社会連携センター
この著者の最新の記事



関連記事